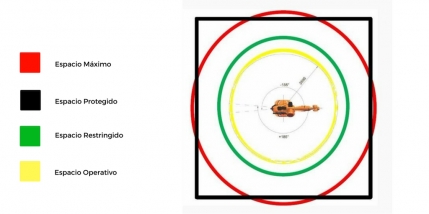
- El área máxima de movimiento del robot (espacio máximo) es generalmente más ancho que la zona protegida por el sistema de protección perimetral (espacio protegido); en tales casos, el espacio restringido del robot debe estar cercado tan cerca como sea razonablemente posible al espacio de operación del robot.
- En los casos en que el sistema de protección perimetral se emplee como límite de movimiento del robot, el espacio protegido y el espacio restringido coinciden.
- El espacio protegido debe ser cercado por protecciones.
- El espacio restringido debe definirse a través de dispositivos que limitan el movimiento del robot y debe ser menor al espacio máximo.
Medios para limitar el movimiento del robot:
Dispositivos mecánicos o no mecánicos de protección (que inician la parada de seguridad del robot cuando se supera el límite fijo). Dichos medios deben cumplir siempre con los requisitos de PL = d y categoría 3 de la norma UNE EN ISO 13849-1, a menos que el análisis de riesgos valide diferentes criterios.
Cuando se emplean dispositivos no mecánicos para la definición del espacio restringido debe tenerse en cuenta la distancia de parada. De forma más específica, al evaluar el espacio de frenado del robot, debe considerarse la carga real del robot y la velocidad máxima de movimiento, a menos que la velocidad sea limitada por un dispositivo de control que cumpla con los requisitos PL = d y categoría 3 de la norma UNE EN ISO 13849-1.
La protección perimetral se puede utilizar para limitar el movimiento del robot, siempre y cuando estén diseñados para evitar la deformación de la protección en caso de fallo de parada del robot; en tales casos, se debe instalar una protección perimetral fuera del espacio de funcionamiento del robot.
Los dispositivos diseñados y construidos para proteger al robot (por ejemplo, sensor anticolisión o protección contra sobrecorriente) no son adecuados para utilizarse como dispositivos limitadores de movimiento de robots, a menos que cumplan con los requisitos de la norma ISO 10218-1.
Los dispositivos mecánicos de protección deben ser capaces de detener el movimiento del robot cuando está trabajando a carga nominal, a velocidad máxima y a la extensión mínima y máxima. Los ensayos de los dispositivos mecánicos de protección deben realizarse sin emplear dispositivos de limitación asistida.Los dispositivos no mecánicos de protección sólo pueden utilizarse si garantizan el mismo nivel de seguridad que los dispositivos mecánicos.
Ejemplos de dispositivos no mecánicos de protección son: paradas eléctricas, neumáticas o hidráulicas, barreras de fotocélulas y láser escáner.











